Design and implementation of simulation RTU software
2022-03-07 16:57:36|
Source:網絡|
views:|
0
The simulation of test environment and test device plays an important role
in R & D and testing. At present, the structural characteristics of plant
and station automation system based on network, open, layered and distributed
and the development trend of digital substation construction in the future make
it possible to develop a general simulation device. This paper introduces a
general simulation system - simrtu system, and expounds the design and
implementation of the system, as well as its general, portable, easy to upgrade
and reducible characteristics.
introduction
As a means of computer-aided analysis, simulation technology is of great
significance to power system and is widely used in system research, test and
personnel training. In a sense, the level of power system simulation technology
represents the level of power system scientific research.
Simulation means "studying the system with model". Generally speaking, the
power system digital simulation refers to the use of computers to establish
mathematical models and simulation models, and study the power system object
itself represented by the model through experiments on the model. This is a
"white box" method starting from the analysis of internal mechanism and
structure.
However, there is another kind of simulation requirements, that is, the
simulation of the test environment and the simulation of the simulation device,
in other words, the simulation of other power system objects working with the
research object. This simulation does not establish the model corresponding to
the prototype according to the principle of mathematical similarity to study the
object itself, but uses the "black box" method of simulation from the external
interface to form the so-called simulation equipment and simulation system to
replace other parts of the system, so that the power system object studied,
tested and demonstrated can operate under the working conditions given by the
model environment, This forms a closed loop. There are quite a lot of such
requirements. For example, it is often said that "platform" and "test
environment" are required during testing; Some remote terminal units (RTU) need
to be connected when testing the dispatching end and several bay devices need to
be connected when testing the RTU responsible for data acquisition; When
debugging the interface with fault recorder, if there is no actual device, the
simulation program of corresponding recorder is required; Even some real-time
tests on the simulation system have to be connected to other devices.
Based on the above situation, in order to facilitate the R & D and
testing of plant and station automation system, simrtu system is developed to
simulate RTU, bay device, etc.
1. System design
The design of simrtu system is based on the analysis of the characteristics
of RTU and station devices. The universal RTU structure described in reference
[6] is no longer universal. Now RTU is characterized by networking and open
structure based on standard protocol. The plant and station automation system
has gradually developed from centralized and decentralized to network-based open
and layered distributed. The newly developed Bay layer devices have generally
the ability of direct access to Ethernet. It can be predicted that a wave of
digital substation construction will be set off in the next few years. These
will guide the further development of the whole power system simulation
technology.
The simulation device and simulation RTU system are discussed from all
aspects. Combined with the technical characteristics of networked, open and
future digital substation of plant and station automation system, this paper
believes that the following characteristics should be paid more attention to in
the design of simrtu system:
1) Versatility. The developed simulation system should not only serve the
automation system of some plants and stations or the energy management system
(EMS) at the dispatching end. This requires the use of standard software
protocol interfaces as far as possible, rather than special hardware interfaces,
including some I / O processing module interfaces.
2) Easy to upgrade. The application environment and functional requirements
of the system are constantly changing, and upgrading is inevitable. Nowadays,
the upgrading of hardware is very fast. For systems with some special embedded
processors and hardware platforms, upgrading may encounter difficulties, because
upgrading means redesign of boards. The software interface is updated more
frequently, and some major upgrades, such as the support for IEC61850 protocol
of digital substation, if
Without full consideration at the design stage, upgrading may mean redesign
and development.
3) Scale scalable. Due to the diversity of environment and requirements,
the simulation system should have good scalability. Scalability refers to the
large-scale joint commissioning and testing that can be.
4) Portable and easy to use. This is self-evident. Furthermore, compared
with an independent test equipment, it is certainly better to make a separate
software package that can run on a general-purpose personal computer (PC).
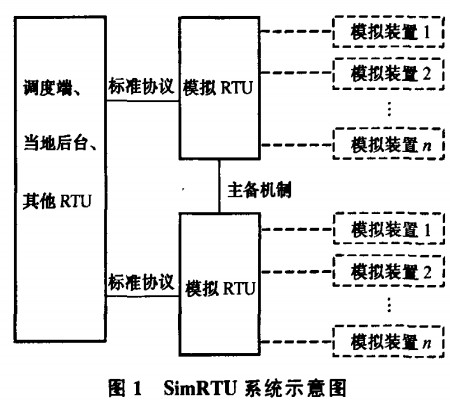
Figure 1 is a schematic diagram of simrtu system. It can simulate one or more
devices, or directly simulate a RTU for centralized data collection, and
communicate with dispatching EMS, local background monitoring system and other
RTU systems through standard protocol. At the same time, it supports the remote
control and remote adjustment of the simulation device to form a closed-loop
test environment. It is very small and occupies only a small amount of system
resources. It can also be used for multi system
Simrtu system has the following basic design:
1) Hardware and operating system
Based on ordinary PC and windows operating system. The communication medium
adopts generally supported Ethernet and serial port, and adopts network mode as
far as possible. Using the function that Windows system can bind different IP
addresses on the same network card, simrtu system can even run on the same
machine with other software. The above design ensures the universality of the
simulation software from the bottom layer.
2) Software framework
Make full use of the communication management computer control center
management (CCM) software developed by Nanjing Zhongde protection and Control
System Co., Ltd. which has been widely used in medium and low voltage plants and
stations. CCM software is a set of multi protocol integrated development /
operation / communication platform developed for the situation of various
communication modes, numerous protocols and complex integrated configuration
modes in the automation control field of power industry.
Simrtu system retains most of the functions of the underlying support
platform in CCM software, and the communication protocol support and application
functions dedicated to the communication management machine are reduced on a
large scale. Only the protocol support in the uplink direction (leading to
dispatching, local background and other RTU directions) is retained, and an
analog RTU protocol is added (which completes the function of the analog
device), The functions not needed as analog RTU are deleted (such as debugging
for communication management machine, synchronizing local background data,
analog operation, data format conversion and other functions), making simrtu
system a system with less resources and large scale (including channel number,
signal number and signal change frequency) Fully configurable stand-alone software.
Figure 2 is the structure diagram of simrtu system. The first layer is the
underlying support platform, which basically takes over the underlying resources
of the system, especially the network and serial port management; The second
layer is the intermediate support layer, including various communication
protocols
Support and other functions, providing a multi-channel communication
environment for the upper layer; The third layer is the application layer,
mainly including channel communication, data viewing, message monitoring and
other functions.

3) Signal processing
The setting of signal processing can be edited manually, or set or cleared
in batch by using table control. The options that can be set for signal
processing include: remote signaling, telemetry and change frequency of remote
pulse quantity; Whether double remote signaling fault status is allowed for
remote signaling; Remote signaling is normally open, normally closed or changes
according to a certain frequency law; Variation range of telemetry and remote
pulse quantity; Whether the remote measurement should be multiplied by the
telemetry coefficient; Change step of remote pulse quantity; How to handle the
received remote control selection and remote control execution command (a
complete remote control process can be executed only when the back to school
processing and execution confirmation processing are set to correct
processing).
4) Standard protocol interface
The external interface of simrtu system is based on standard protocol to
ensure its openness and applicability in most cases. At present, the main
supported protocols are IEC 60870-5-101, IEC 60870-5-103,IEC 60870-5-104 protocol and OPC server standard interface, and support for
IEC61850 will be added in the future.
5) Upgrade
Based on a stable support platform, simrtu system is very easy to add new
protocols in the future. Using the upgrade function of CCM software, this RTU
program also has the upgrade function automatically. For example, the support
for IEC61850 is relatively easy to transplant because it has the same support
platform.
6) Logical processing
Some logic calculations can be carried out for remote signaling value and
telemetry value With the timer mechanism, when the conditions are met, it can
actively trigger some signal displacement, remote control operation, etc. This
simulates the interior of the device to some extent
Function and interlocking locking function between devices to better
realize the interactive feedback characteristics.
7) Content that cannot be emulated
Starting from the external interface of the device, simrtu system simulates
the general functions of the device, but cannot simulate the internal functions
such as setting value and protection characteristics.
2. Specific implementation of the system
In terms of specific implementation, simrtu system has the following
characteristics:
1) Development tools
Using Visual C + + 7.0 and Microsoft basic class library (MFC) programming,
some third-party software is required, such as serial port support dynamic link
library, OPC support software library, table control with source code, etc.
2) System scale
In terms of capacity, it can support 80000 remote signaling, 10000
telemetry and 3000 remote pulse quantities at most; In the number of channels,
there are 36 analog RTU ports at most and 100 other ports (including uplink
communication ports). If you need a larger scale, you can run several more
simrtu programs (even on the same machine if resources allow).
3) Data flow and distribution
Fig. 3 is the schematic diagram of data flow distribution of simrtu system.
Taking the remote signaling signal as an example, the simrtu system stores the
data space numbered 1 ~ 2, and each analog device is responsible for updating
one of these numbers without overlapping with each other; According to the
setting, simrtu system sends part or all of the data space in different row
directions. At this time, different dispatching ends and local users may need
different data.

4) Supported protocols
At present, the uplink mainly supports IEC 60870-5-101 sub station
protocol, IEC 60870-5-104 sub station protocol, IEC 60870-5-103 sub station
protocol, OPC server-side and other protocols, as well as the main and standby
channels of the main and standby machines. The downlink (direction to the
device) only has analog RTU protocol, which is a virtual protocol (i.e. not
actually connected to the signal source device). In fact, it simulates a device
to automatically generate various preset signal changes. As mentioned earlier,
the protocol upgrade of simrtu system is relatively convenient.
5) Performance
Because it only simulates the device from the external interface, the
processing is simple, and the processing capacity of the central processing unit
(CPU) on the ordinary PC is much stronger than that on the device, the real-time
performance of the simrtu system is very high. On the desktop computer with P3
processor, 1.4GHz main frequency and 256MB memory, it is stipulated that 1000
remote signaling signals must be generated every 3 s and sent to an uplink
channel (which can be connected to a dispatching terminal, local background or
front-end computer) through IEC 60870-5-104 active uplink protocol. After
continuous operation for 15min, the CPU peak value of simrtu system itself is
less than 10%, Most of the time, the CPU share is less than 4%. As for memory
usage, it is mainly related to the configuration of simrtu system.
When the full configuration is used (supporting the most semaphores),
taking the above machine environment as an example, it needs to occupy 36mb of
memory and 50MB of virtual memory.
3. Application fields of the system
1) Development and debugging
When developing new products, it is often necessary to connect an actual
device for debugging, which requires the preparation of power supply, device,
interface line, etc. during the actual debugging, it is also necessary to
manually "point signal" (it is necessary to operate the device to generate
signal); It is more troublesome to generate signals that change regularly
(including change frequency, change amplitude, etc.). Now just run simrtu
program, the signals can be generated automatically as required, and can respond
automatically when debugging remote control and remote adjustment operations,
providing a closed-loop test environment.
In fact, simrtu system is also a protocol tester supporting several
standard protocols.
2) Copy machine test
Simrtu system enables testers to easily set which signals on the analog
device need to change and what frequency to change, so as to slightly adjust the
test environment. In the past, when factory acceptance test (fat) did
"avalanche" test, it often needed to spend a lot of energy to find the signal
source. Using simrtu system can easily generate the required signal. In the
past, the machine copying test often needed to last for several days. It was
necessary to "point the signal" every few hours, and carry out various tests and
records. Simrtu system can more accurately generate the required signals and
automatically record them.
3) Performance test
Due to the fine setting of signal generation mode and supporting the
closed-loop test function of remote control and remote adjustment, simrtu system
can easily construct various extreme situations to test the network performance
and real-time performance of other systems.
4. Conclusion
The main features of simrtu software are universal, portable, easy to
upgrade and scale scalability. However, it still has many improvements, such as
providing replay function by reading historical data, which requires adding a
special interface to access the database of the corresponding monitoring system;
Most of the generated signals are random signals limited in a certain range, and
the internal logical correlation is not enough. With the further development of
plant and station automation system, especially the implementation of digital
substation technology, online simulation device and analog RTU system will also
change greatly.





 Official Wechat
Official Wechat
 Tmall shop
Tmall shop
 JD shop
JD shop
 銷售王經理
銷售王經理
 微信公眾號
微信公眾號